
Request a Quote
Request a Quote
Nos últimos anos, os casos de aplicação de robôs industriais na China aumentaram rapidamente, principalmente em aplicações, aplicações específicas e outros campos, e não há muitas aplicações em dobra. A dobra de peças é um tipo de trabalho amplamente utilizado e apresenta certo perigo, por isso a perspectiva do mercado de dobra por robô é muito otimista e há muitas experiências de sucesso no exterior. Atualmente, 40% - 50% das máquinas de dobra em escritórios de processamento de chapas metálicas na Europa e na América estão equipadas com sistema de dobra automática robótica, enquanto a automação de dobra na China está apenas no início. Nos próximos 10 anos, a demanda doméstica por robôs dobradores aumentará em linha reta.

A unidade de usinagem flexível para dobra de placas CNC com robô como parte executiva principal é um conjunto de combinação de equipamentos altamente automáticos, que tem como vantagens de alta eficiência, alta qualidade e alta flexibilidade. Na unidade de usinagem flexível de dobra, a escolha da combinação de componentes pode fornecer melhor suporte para melhorar a eficiência e flexibilidade da usinagem. A precisão da dobra depende da precisão da própria dobradeira, da precisão de posicionamento do robô e do controle cooperativo entre o robô e a dobradeira. A dificuldade do controle cooperativo reside na correspondência de velocidade entre o robô e a dobradeira, bem como na trajetória do robô que suporta uma peça. O leve efeito de acompanhamento afetará seriamente o efeito de formação do ângulo de flexão e da placa.
A unidade de processamento quase dobrada (Figura 1) toma o robô e a máquina dobradeira como núcleo, e a pinça, plataforma de carregamento, plataforma cega, bancada de posicionamento, estrutura giratória, dispositivo de troca manual e vários sensores de detecção como componentes auxiliares
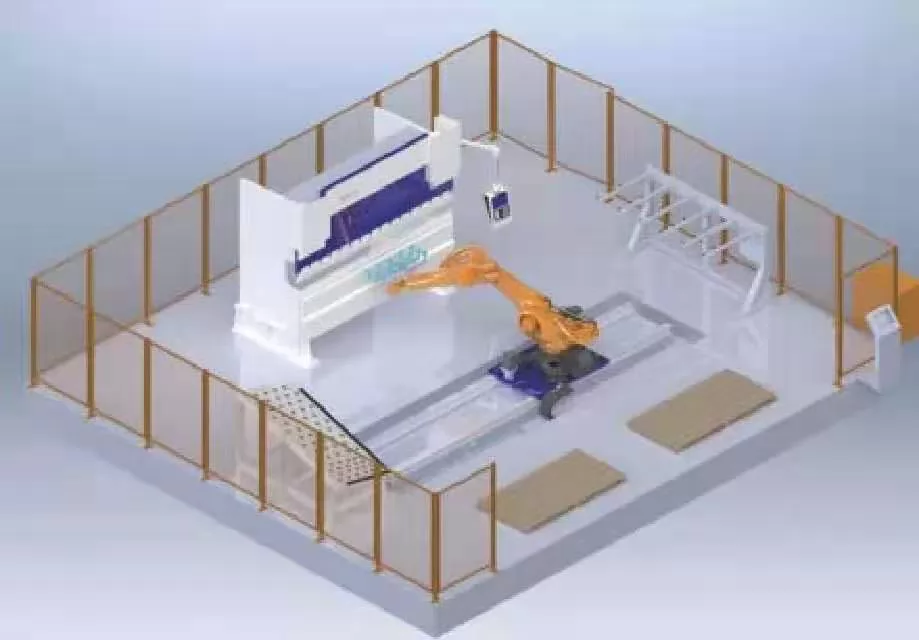
A garra é a “mão ”de um robô em vez de trabalho manual. A pinça do robô dobrador é geralmente composta por diversas ventosas instaladas em uma estrutura metálica. Plataforma de carga e plataforma de descarga geralmente adotam paletas de paletização, e correia transportadora ou mesa de rolos também são usadas para transporte de materiais-primas e produtos acabados. Placas oleosas são simples de adesão, o que faz com que você pegue vários pratos ao mesmo tempo. Um dispositivo de separação (como um separador magnético) e um sensor de detecção podem ser instalados ao lado da mesa de alimentação para garantir que as placas a serem agarradas fiquem soltas. A mesa de posicionamento é uma plataforma inclinada com defletor, sobre quais existem microesferas elevadas. O robô transfere uma placa de aço para a plataforma de posicionamento e uma placa desliza livremente para a borda de retenção sob a gravidade. Como a posição e a borda da mesa de posicionamento são fixas, quando o robô agarra a placa novamente, a posição da placa e da garra é relativamente precisa e fixa, o que fornece uma referência para a próxima dobra. O tripé é uma estrutura fixa do dispositivo de agarramento. Quando o robô precisa levar uma peça de trabalho para uma posição diferente, ele pode colocar uma peça de trabalho na estrutura rotativa para fixá-la e então o robô pode agarrar a peça de trabalho novamente em uma nova posição. Em algumas graças especiais, também é possível utilizar o molde da dobradeira para fixar a peça e alterar a posição da garra.
O trabalho da unidade de processamento de dobra é dividido principalmente em seis processos: alimentação, recuperação, centralização, torneamento, dobra e empilhamento, conforme mostrado na Figura 2.
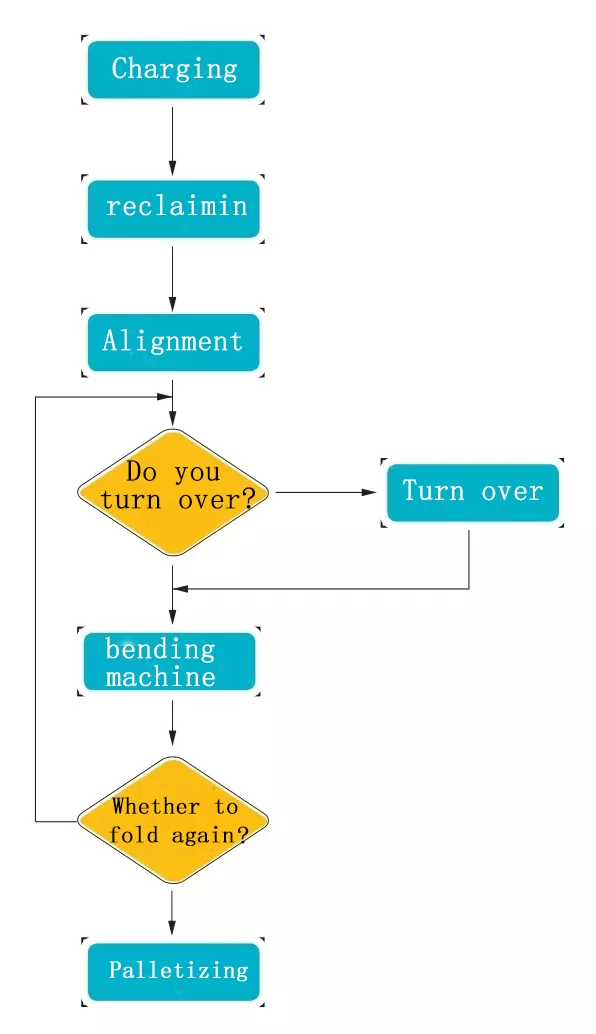
1. Carregando. Coloque manualmente toda a pilha de placas a serem processadas na plataforma de carregamento e instale o interruptor de detecção de placas na plataforma de carregamento para evitar que o robô agarre na bandeja após todas as placas sendo processadas.
2. Retire os materiais. O robô corre até a posição da plataforma de carga e detecta a altura da placa através do sensor ultrassônico instalado na garra. De acordo com os dados de detecção, ele corre automaticamente para a posição correta para agarrar a placa. Depois de agarrar a placa, ele mede a espessura da placa através do dispositivo de medição de espessura, para evitar agarrar várias placas ao mesmo tempo, resultando em falha no processamento. Após passar na medição de espessura, está pronto para centralização.





.png)




.png)
.png)